Robot Syringe
An automated syringe that allows robotic arms to garden
This project involved the creation of a Bluetooth controlled syringe that could be attached to the end of a UR3 robotic arm. The project was exploring the relationship between the digital and the biological. The goal was to create a robotic system that could slowly over time tend to a garden, effecting the growth of the plants in interesting ways through constant but very slow interaction.
In order for the robot to be able to interact with the plants it had to be able to pick up and plant seeds and provide water for the seeds over their lifetime. We realised that we could achieve both of these actions through the use of a syringe. Pulling the syringe up would create a suction that would stick a seed to the tip of the needle, releasing this suction would drop the seed at the correct time. The robot would move to a reservoir of water and suck some up periodically to water the growing plants.

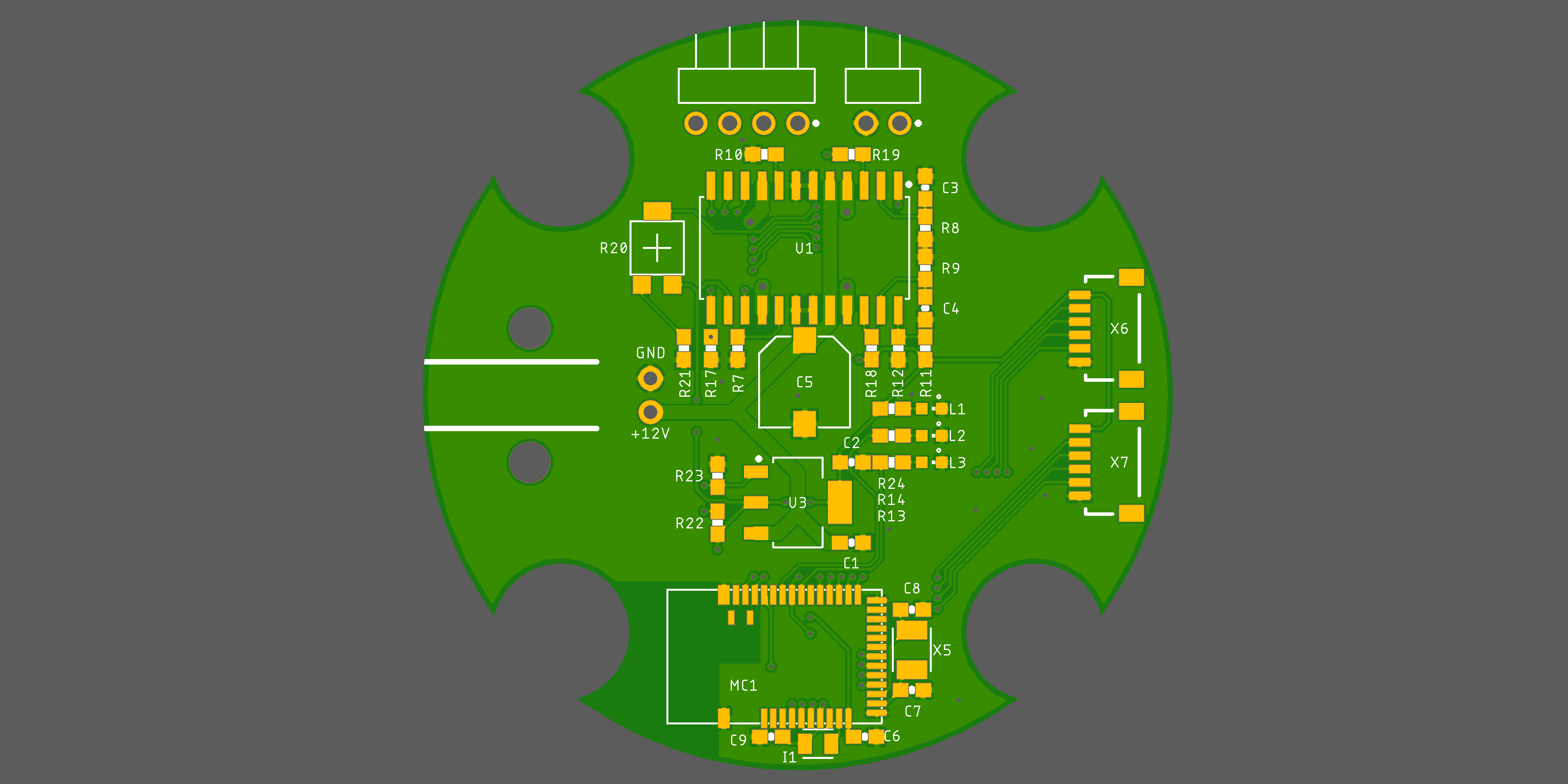
My work involved creating the Bluetooth enabled circuit board that was embedded in the system as well assisting in designing the mechanism that would push and pull the syringe. The mechanism uses a stepper motor to drive the plunger up and down. The circuit board included an integrated motor driver to allow for this. I also wrote software that interfaces between the Bluetooth of the driver board and the operating system of the robots. This allows for direct control over the syringe within Rhino and the Grasshopper plugin (a common software package for interfacing with robotic arms). This makes it easier for people familiar with programming the robot arms through Rhino to program the syringe as well.

